Dimensional and Rotational Testing of MOM6
Marshall Ward Robert Hallberg
Alistair Adcroft
NOAA-GFDL / Princeton U.
23 Sept 2021
Title has been trimmed down to fit on the slide
Will talk about the MOM6 ocean model
specifically our method for producing and retaing bit-reproducible answers in an community development environment
Will focus on two of the more novel tests:
dimensional scaling
rotational invariance
And will outline how we apply these tests in a bit-reproducible manner
Although I am presenting...
Genesis of ideas from Bob Hallberg
had the audacity to assert that this was achievable.
and fleshed them out with Alistair Adcroft, both at GFDL in Princeton.
I just came in at the end and implemented them.
Ocean Dynamics
Very briefly:
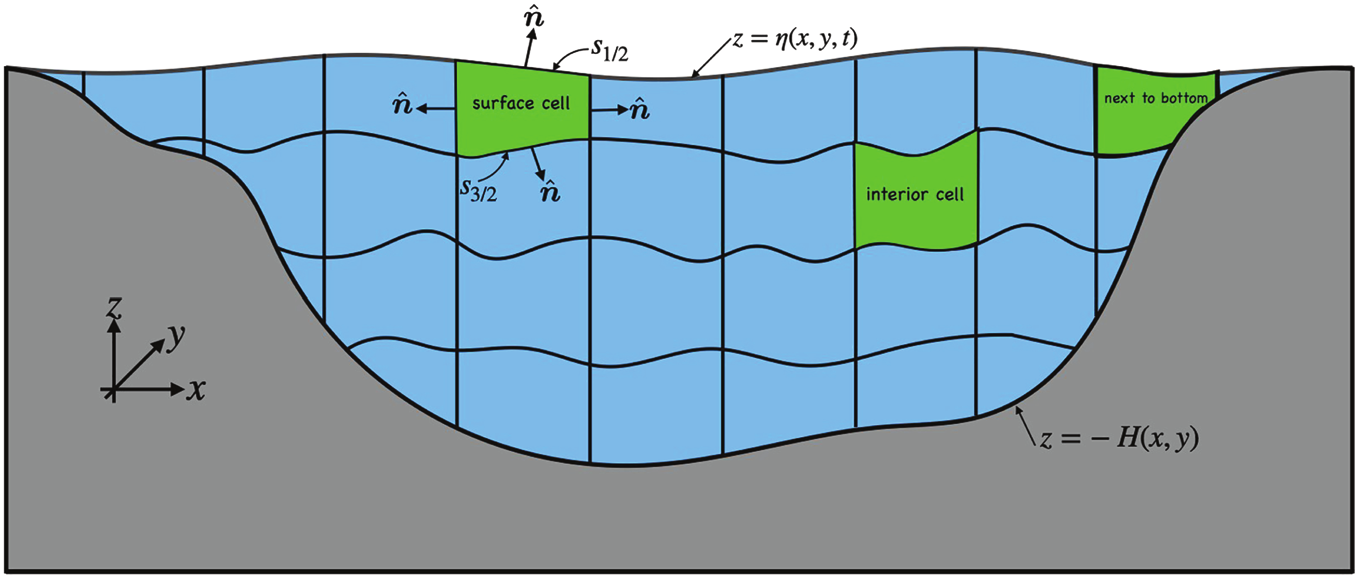
MOM6 is a finite volume ocean model
Strong parallels to atmosphere dynamics
Ocean is like an "upside down atmosphere"
Primarily finite volume:
Momentum balance ("newton's law")
Hydrostatic balance => No elliptic PDEs (horizontally)
Advection of heat, salt, biomass, etc
Usually Boussinesq (volume-conserving)
Coriolis force is a major driver
External forcing (heat, precip, wind)
Sometimes prescribed, sometimes from another model
Many "submodels":
"LES"-like parameterizations
Complex vertical mixing
Boundary layers in surface, shelf
Turbulent Dynamics
Video
Within those phenomena:
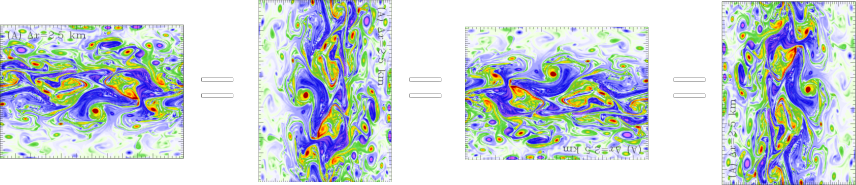
A profoundly turbulent flow
And one that is quasi-2D, which has the unique property of pushing energy from small to large length scales
And On top of the usual chaotic dynamics
As a result:
Enormously sensitive to small differences in values
Even LSB changes can produce very different eddy fields
We assert (assume?) that that statistical features of such flows are resilient
the other video shows that they are at least persistent.
But demonstrates that bit reproducibility is vital to replicating prior results.
Motivation
Sustain long simulations over decades, centuries
Accurate preservation of tracers
Residual noise can cause chaotic growth
Operational work needs robust testing
Reproducible floating point arithmetic is essential
Solution verification
Step Days Energy/Mass [m2 s-2] Mean Sea Level [m] ...
0 0.00 7.2161166068132286E-27 1.8190E-12 ...
12 0.50 2.7781004671136538E-04 1.1369E-12 ...
24 1.00 2.7734897826598717E-04 1.8190E-12 ...Based on global metrics (energy, mass, etc)
Diagnostic verification
u-point: ocean_model-u
min = -6.7187595818683776E-03 max = 3.3480219779204019E-02
mean = 1.1239682303793666E-04 bits = 21851
v-point: ocean_model-v
min = -8.3469699425156359E-03 max = 6.8420831486068704E-03
mean = 1.2076392816784489E-03 bits = 18606
h-point: ocean_model-h
min = 9.9999999999999915E-04 max = 5.6265092225099863E+02
mean = 3.6490088139048595E+02 bits = 18673
...Min, max, mean, bit count for every diagnostic
Verification Suite
Also called "invariance tests"
Configured for different compilers, environments
Platform-independent:
no reference answers
identical comparisons
"Regression" test for reference code (e.g. main)
Verification Tests
grid
Symmetric/Asymmetric memory grids
layout
1×1 and 2×1 domain decomposition
restart
Restart at mid-run
dimension
Dimensional scaling
rotation
Index rotation
openmp
OpenMP (single-thread)
Validation Testing
Specified for our machine
Does have reference answersVery strict testing
Floating Point Review
\[\phi = (-1)^\color{yellow}{s} \times 2^\color{aquamarine}{M}
\times (1 + \color{pink}{\alpha})\]
Smallest fractional diff: \(2^{-52} \approx 2.2 \times 10^{-16}\)
17 digits to uniquely specify a result
Things we ignore: - Inf and NaN - Denormals
We will return to negative zero.
Exponent manipulation is associative integer arithmetic
Addition Associativity
What is \(10^{-16} + 1 - 1\) ?
\[\begin{aligned}
(10^{-16} + 1) - 1 &\equiv 0 \\
10^{-16} + (1 - 1) &= 10^{-16}
\end{aligned}\]
Residuals below ULP (\(2\times10^{-16}\) ) are lost.
ULP: Unit of least precision (or lowest bit)
10^-16 is below the current ULP (2x10^-16), so is lost in the first example.
Cancellation in the second summation shifts ULP, preserving 10^-16.
Floating residual
Let \(s = 1 + 2 \times 10^{-16}\) . What is \((s + 1) - 1\) ?
\[\begin{aligned}
s + 1 &= 2 \\
(s + 1) - 1 &= 1 \neq s
\end{aligned}\]
Manipulation of \(s\) shifts ULP to \(4 \times 10^{-16}\) .
Nearly identical issue, but illustrates a 2x increase in ULP
Multiplication associativity
If \(a = b = 1.5\) , and \(c = 1 + 2^{-52}\) , then
\[\begin{aligned}
(a \times b) \times c &\equiv 2.25 + 2^{-51} \\
a \times (b \times c) &\equiv 2.25 + 2^{-50}
\end{aligned}\]
Multiplication is less volatile:
Exponents are integer arithmetic -> associative
Only fractional part is non-associative
frac can only increase (not decrease) ULP, dropping last bit
Note: Actual results depend on rounding rules
Explicit Ordering
Ambiguous ordering is rejected:
\[x + y + z\]
Parentheses are required :
\[\begin{aligned}
(x + y) + z \\
x + (y + z)
\end{aligned}\]
Select to optimize accuracy and performance.
Accuracy: Preserve residuals
Performance: Gather repeated values (for example)
Implementation
GCC Fortran
gfortran -fprotect-parens ... # default
gfortran -Ofast ... # Sets -fno-protect-parensIntel Fortran
ifort -assume protect-parens # Not default
We try to avoid Intel's -fp-model style flags
If anyone asks: J3/18-007r1, 10.1.5
Global Summation
Parentheses work, but have cumulant errors:
\[\sum{\phi} = (\phi_1 + (\phi_2 + ( \phi_3 + ... )))\]
Fixed-precision is accurate and independent of order:
The sum() intrinsic is ambiguous!
Parentheses are OK for cumulant sums, but there are problems:
Must gather to one rank/thread before summing
Cumulant errors depend on order, threaten accuracy
Cumulant sums over multiple bins resolve these issues.
Hallberg and Adcroft, 2014: An Order-invariant Real-to-Integer Conversion Sum. Parallel Computing, 40(5-6), DOI:10.1016/j.parco.2014.04.007
Alistair says:
Many people are aware that those last digits we write out vary depending on the order of summation. Not so for us which is why we can use it as a metric for detecting regression.
Bob says:
With the global reproducing sums, we are able to get identical values to roundoff compared with the single largest value in the sum, rather than roundoff compared with the sum itself. For an ocean model on a 1000x1000 grid, we are routinely able to detect global non-conservation that is larger than about 1 part in 10^20.
Transcendentals
How is sin(x) computed? Ambiguous!
\[f(48^\circ) = 2 \Omega \sin \left( \frac{48 \pi}{180} \right)\]
glibc 2.22: 0.108381727637274115E-03 (3F1C695FE71A3FE4)
2.26: 0.108381727637274128E-03 (3F1C695FE71A3FE5)Other compilers may not even use libm!
We avoid transcendentals where possible, and manage dependencies when necessary.
Higher order powers
How to evaluate \(z^6\) ?
These forms are ambiguous:
z6 = z * z * z * z * z * zz6 = z**6Compilers may use libm pow(), also ambiguous.
We recommend:
z3 = z * z * z
z6 = z3 * z3(Why not (z * z) * z?)
Negative Zero
Although \(-0 = 0\) , bit count will differ.
\[\begin{aligned}
\phi \times 0 =
\begin{cases}
0 & \text{if $\phi \geq 0$} \\
-0 & \text{if $\phi < 0$}
\end{cases}
\end{aligned}\]
\(0 \Leftrightarrow -0\) transitions can detect unexpected values.
But if unresolvable, add a zero: \(-0 + 0 \Rightarrow +0\) .
(e.g. min() intrinsic)
Challenge of -0: Identical to +0 for all practical purposes.
Example of "all else fails": MPI_min/max is not consistent with 754 rules.
See: https://github.com/NOAA-GFDL/MOM6/pull/1009
But a -0 during testing may be a prelude to a more serious problem in production.
Examples of volatility:
Incomplete initialization
Incomplete rotation
Issues in halos are not uncommon.
Dimensional Consistency
From the seawater equation of state:
intz(m) = &
g_Earth * dz * ((p0 + p_ave) * (I_Lzz * I_al0) - rho_ref_mks) &
- 2.0 * eps * I_Rho * (lambda * I_al0**2) * eps2 * ( &
C1_3 + eps2 * (0.2 + eps2 * (C1_7 + C1_9 * eps2)) &
)Can we ensure expressions are dimensionally correct?
Associative Scaling
Recall the floating point format
\[\phi = (-1)^{\color{yellow}s} \times 2^{\color{yellow}M}
\times (1 + {\color{yellow}\alpha})\]
Power-of-two multiplication is associative
\[2^\color{yellow}{N} \times \phi \times 2^\color{yellow}{-N} = \phi\]
This provides a basis for bitwise dimensional scaling.
Dimension Scaling
Fields rescaled by dimensions should be invariant
\[\begin{aligned}
u^{n+1} &= u^{n} + \Delta t \times \mathcal{F} \\
\color{yellow}{2^{L-T}} u^{n+1} &= \color{yellow}{2^{L-T}} u^{n}
+ \color{yellow}{2^T} \Delta t
\times \color{yellow}{2^{L - 2T}} \mathcal{F}
\end{aligned}\]
GFD Scaling
\[\begin{aligned}
u_t + u u_x + v u_y &= -g h_x \\
v_t + u v_x + v v_y &= -g h_y \\
h_t + h u_x + h v_y &= 0 \\
\end{aligned}\]
Dimensions:
\(L\) (horiz. length)\(T\) (time)\(H\) (layer thickness)
Invariants:
\(\left[ u, v \right] = L T^{-1}\) \(\left[ g \right] = L^2 T^{-2} H^{-1}\)
Shallow water eqns, a lower dimensional ocean model.
MOM6 Dimensionality
s
T
Time
m
L
Horizontal length
m
H
Layer thickness
m
Z
Vertical length
kg/m3
R
Density
J/kg
Q
Enthalpy
The currently tracked units are shown in this table.
Salinity is a potential scaling
Implementation
Input parameters
call get_param(... , "DT", ... , scale=US%s_to_T)Explicit constants
eps_vel = 1.0e-10 * US%m_s_to_L_T
ustar = 0.01 * US%m_to_Z * US%T_to_sDiagnostic registration
call register_diag_field(..., "u", ... , conversion=US%L_T_to_m_s)"US" contains user-defined power-of-two rescalings.
Rotational Consistency
PFu(I,j,k) = (((za(i,j)*dp(i,j) + intp_dza(i,j,k)) - &
(za(i+1,j)*dp(i+1,j) + intp_dza(i+1,j,k))) + &
((dp(i+1,j) - dp(i,j)) * intx_za(I,j) - &
(p(i+1,j,K) - p(i,j,K)) * intx_dza(I,j,k)) ) * &
(2.0*G%IdxCu(I,j) / ((dp(i,j) + dp(i+1,j)) + dp_neglect))PFv(i,J,k) = (((za(i,j)*dp(i,j) + intp_dza(i,j,k)) - &
(za(i,j+1)*dp(i,j+1) + intp_dza(i,j+1,k))) + &
((dp(i,j+1) - dp(i,j)) * inty_za(i,J) - &
(p(i,j+1,K) - p(i,j,K)) * inty_dza(i,J,k))) * &
(2.0*G%IdyCv(i,J) / ((dp(i,j) + dp(i,j+1)) + dp_neglect))Can we ensure consistency of expressions like this?
Horizontal Rotation
Rotate input fields, forcing, coordinates.
(x,y) and (u,v) describe first and second index
We call this an "index rotation" because even the coordinates are rotated.
Fields, grid, topography are rotated
Even "latitude" and "longitude" are rotated.
(X, Y) and (U, V) refer to the first and second index, not physical directions.
This is why I resist calling it a "solid body rotation".
Index Rotation
Perhaps "rotation" is not the best term, since it is more like a reordering of the array.
But I think it is accurate to call it a rotation of the index map, hence the term "index rotation".
Applying the Rotation
Read inputs on coupler grid
Move to rotated MOM6 grid
De-rotate fields sent back to coupler and output
All rotations are handled internally.
Users do not need to manually apply any rotations.
Rotational Pairs
For 90° rotations:
Scalar
\(\phi(I,J) = \phi(j, N-i)\)
Array pair
\(\phi_u(I, J) = \phi_v(j, N-i)\) \(\phi_v(I, J) = \phi_u(j, N-i)\)
Vector
\(u(I, J) = v(j, N-i)\) \(v(I, J) = -u(j, N-i)\)
All quarter-turn rotations are supported.
More generally, a rotation is a reverse+transpose of the fields
Invariant stencils
\(\phi^{(c)}_{i,j} = \frac{1}{4} (\phi_A + \phi_B + \phi_C + \phi_D)\)
\(\frac{1}{4} (
(\color{LightCoral}{\phi_A} + \color{LightCoral}{\phi_B})
+ (\color{LightSkyBlue}{\phi_C} + \color{LightSkyBlue}{\phi_D})
)\)
\(\frac{1}{4} (
(\color{LightCoral}{\phi_A} + \color{LightSkyBlue}{\phi_C})
+ (\color{LightCoral}{\phi_B} + \color{LightSkyBlue}{\phi_D})
)\)
\(\frac{1}{4} (
(\color{LightCoral}{\phi_A + \phi_D})
+ (\color{LightSkyBlue}{\phi_B + \phi_C})
)\)
Example: Interpolation from vertex to center point
The ideal outcome is to construct the stencil in a rotationally invariant form.
The first example will evaluate its terms in a different order after a quarter turn.
The second form is rotationally invariant to any number of quarter turns.
Rotational ordering
subroutine advect_tracer(...)
! ...
x_first = modulo(turns, 2) == 1
if (x_first) then
call advect_x(...)
call advect_y(...)
else
call advect_y(...)
call advect_x(...)
endif
end subroutine advect_tracerWhen all else fails, reorder the algorithm.
This is a last resort, but may be required if complexity has grown out of control.
Order of Operations
Kinetic energy calculation:
tmp1(i,j,k) = &
0.25 * KE_scale_factor * (areaTm(i,j) * h(i,j,k))) &
* (u(I-1,j,k)**2 + u(I,j,k)**2 + v(i,J-1,k)**2 + v(i,J,k)**2)tmp1(i,j,k) = &
(0.25 * KE_scale_factor * (areaTm(i,j) * h(i,j,k))) &
* ((u(I-1,j,k)**2 + u(I,j,k)**2) + (v(i,J-1,k)**2 + v(i,J,k)**2))https://github.com/NOAA-GFDL/MOM6/pull/1216/files
Dimensionality
Salinity contribution to diffusivity:
Kd_lay(i,j,k-1) = Kd_lay(i,j,k-1) + 0.5**KS_extra(i,K)
Kd_lay(i,j,k) = Kd_lay(i,j,k) + 0.5**KS_extra(i,K)\(\ldots + \left(\tfrac{1}{2}\right)^{\kappa_S}\) ?
https://github.com/NOAA-GFDL/MOM6/pull/921
Actually discovered during implementation of the dimensional scaling, rather than detected by the dimensional scaling test. But it's the sort of thing that would have been found...
Rotational Symmetry
subroutine thickness_diffuse_full
! ...
Work_u(I,j) = Work_u(I,j) + G_scale * (...)
Work_v(i,J) = Work_v(i,J) - G_scale * (...)
!...
end subroutine thickness_diffuse_fullhttps://github.com/NOAA-GFDL/MOM6/pull/1050
Cost of Reproducibility
We forfeit compiler's ability to optimize expressions!
We are responsible for parentheses placement
Summations are expensive!
This is an infrequent operation in our model
In general, we value reproducibility over speed.
Summary
Bit reproducibility is essential, and achievable!
Methods for bit reproducibility
Use parentheses for arithmetic operations
Avoid ambiguous intrinsics: sum(), sin(), ...
Manage transcendentals when possible
Enables aggressive regression testing
Dimensional consistency
Rotationally symmetric solvers